Automatic Sensor Based Wall Painting Robot Ppt
Https Zenodo Org Record 269655 Files Paper 6 20 20issue 1 20 20engg 20full 20paper 20page 2049 56 20 20vani 20mukundan 20sirajudeen 20jan 2017 Pdf

Pdf Automatic Robotic Spray Painting Of Low Volume High Variant Parts
Http Www Allsubjectjournal Com Download 685 46 Pdf
Http Ijariie Com Adminuploadpdf Automatic Wall Painting Robot Ijariie5422 Pdf

Automatic Room Lights Using Arduino And Pir Sensor Cctv Security Systems Arduino Home Automation Room Lights

Pdf Design Of An Autonomous Wall Painting Robot

Based on the results it proposes a conceptual model of the apartment building exterior wall painting robot to be developed.
Automatic sensor based wall painting robot ppt. These reasons makes us to develop automatic wall painting robot. By repeating the process like pulling the roller and lifting the ladder may cause back ache. The wall painting robot consists of the exhausting vacuum attraction type robot main body equipped with travelling wheels the painting arm with a number of spraying guns and the airless painting device. Paint rollers and paint brushes were used to paint the wall from top to bottom.
The robot consist of an arm which scan the wall vertically ir sensors are fitted on the arm. The robot is designed using few steels conveyor shaft spray gun and a controller unit to control the entire operation of the robot. This robot is compact because of high speed and pressure capabilities they have. Existing automated wall painting system.
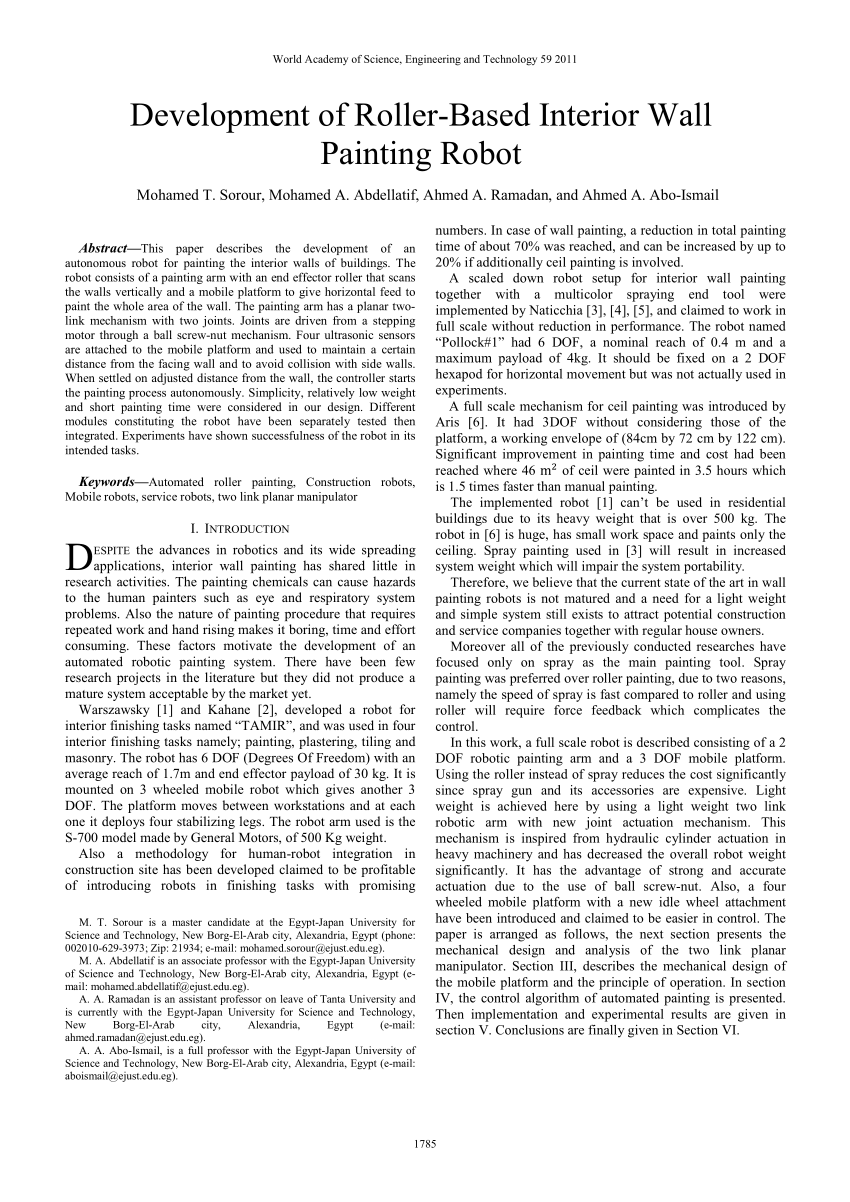
Global spray painting robot market expected to rise at a remarkable cagr by 2021 this report studies spray painting robot in global market especially in north america europe china japan southeast asia and india with production revenue consumption import and export in these regions from 2011 to 2015 and forecast to 2021. The robot consists of a painting arm with an end effector roller that scans the walls vertically and a mobile platform to give horizontal feed to paint the whole area of the wall. Robotic painting is economically feasible for large lot sizes since a robot program needs to be established using off line programming and or manual teach in for each single part variant. Table 1 shows the specifications of the wall painting robot and fig.
Final year project of mechanical engineering by ramesh kumar ajit kundan vishal. The project goal is to provide economic possibilities for usage of robots in painting of large part families e g see figure 1. Sprayer spray painting is a painting technique where a device sprays a coating paint ink varnish etc through the air onto a surface. Then the authors analyze economic feasibility of the automated method in an effort to verify the benefits gained from the exterior wall painting robot ewpro through the comparison with the conventional method.
2 the system configuration drawing. The robot has 6 dof degrees of freedom with an average reach of 1 7m and end effector payload of 30 kg. This automatic wall painting robot is not designed using complicated components. Warszawsky and kahane developed a robot for interior finishing tasks named tamir and was used in four interior finishing tasks namely.
Pdf Development Of Roller Based Interior Wall Painting Robot

Arduino Based Automatic Plant Irrigation System With Message Alert Irrigation System Irrigation Diy Irrigation

Pir Motion Sensor Light Switch Is Designed Using The Arduino To Deter The Thief Motion Sensor Pir L Motion Sensor Lights Motion Sensor Simple Arduino Projects

Arduino Based Floor Cleaning Robot Using Ultrasonic Sensor Cleaning Robot Electronics Projects Arduino
Http Www Ijtrd Com Papers Ijtrd7842 Pdf
Https Www Ijert Org Research System Design Considerations For Autonomous Wall Painting Robot Ijertv2is100556 Pdf

Creative Robot Art Shows Light Bulb Plugging Itself In Techeblog Lamp Light Bulb Bulb

Creative Robot Art Shows Light Bulb Plugging Itself In Techeblog Lamp Light Bulb Bulb

Ultrasonic Distance Sensor In Arduino With Tinkercad Arduino Sensor Ultrasonic
Robotics Projects For Engineering Students Electronicshub Org
100 Robotics Projects For Final Year Engineering Students

Industry 4 0 Sensors Poster Map Map Screenshot Poster

In Today 39 S Tutorial I Am Going To Share A New Proteus Library Named As Flex Sensor Library For Proteus I Am Quite Excited While Flex Sensor Library

Automatic Door Opening System Using 8051 Microcontroller Automatic Door Automatic Door Opener Electronic Circuit Projects

Home Automation System Using Gsm And Arduino Block Diagram

Arduino Uno Blueprint Poster Free Download Produced By Elektor For Element14 You Arduino Arduino Projects Arduino Programming

Plc Program For Automatic Mixing Controlling In A Tank In 2020 Ladder Logic Plc Programming Problem And Solution

Oil Separating Machine Mechanical Final Year Project Youtube Oils Mechanic Projects
Https Encrypted Tbn0 Gstatic Com Images Q Tbn 3aand9gcsezriqfmtjgytrh29xzwvi5jkgugslxibzu5dibqq Usqp Cau

Penxzyl 3 1 Arduino Brush Plotter New And Improved Cnc Hackster Io In 2020 Electronic Circuit Projects Arduino Projects Arduino

Ganesh Paintings Ganesh Art Hindu Art Ganesha Painting Hindu Art Ganesha Art

Painted Pressure Sensor

The Most Disruptive Technologies Disruptivetechnology Blockchaintechnology Blockchaindevelopers Tgit Thursdaythoughts

Pin Na Doske Malinka

Nodemcu Esp8266 12 E Controlling Stepper Motor Over Wifi Stepper Motor Arduino Stepper Motor Wifi

Lord Ganesha Lord Ganesha Paintings Lord Ganesha Ganesha Painting

By Floris Wouterlood March 8 2016 Summary This Paper Describes Data Acquisition With An Arduino Nano From Eight Ds1 Arduino Arduino Display Arduino Projects

Wireframed Female Cyborg Touching Digital Graph Interface Ai Artificial Intell Sponsored Graph Digital Ai Interface Interface Robot Female Cyborg

Us Infographic Smart Home Statistics 2019 Google Search Security Lights Smart Home Home Automation

Fabrication Of Automatic Wall Painting Machine Ijert

Disappear By Thomas C Fedro From Pop Art Art Painting Abstract Art Painting Modern Art Abstract

Pdf Paintcopter An Autonomous Uav For Spray Painting On 3d Surfaces

Pin On Organic Medicinal Chemistry International Journal Juniper Publishers
The Simatic Information Server Has Access To Archived Process Values And Messages In The Process Historian As Well As Directly In Wincc Wincc Runtime

Lamb Of God Metal Posters Art Heavy Metal Art Rock N Roll Art

How To Build Arduino Quadcopter Drone Step By Step Diy Project Arduino Quadcopter Arduino Drone Technology

Pin By Ayaz Madni On Software Automation Solidcam Studio

Telpo Tps980 Is An Android Biometric Facial Recognition Terminal With Infrared Sensor And Face Recognition Camera Tps980 Front Camera Support High Dynami

8x8 Led Matrix Max7219 Tutorial With Scrolling Text Android Control Via Bluetooth Howtomechatronics In 2020 Led Matrix Arduino Scrolling Text

Voltage Current Electricity Magnetism Magnets Electricity Physics

Lg 50 Class 7 Series 4k Uhd Led Lcd Tv In 2020 Lcd Tv Uhd Tv Smart Tv

Arducam For Esp8266 Websocket Camera Demonstration Arduino Arduino Wifi Arduino Board

